Social isolation in shared spaces threatens community cohesion and well-being. This paper presents a social robot designed to spark human-to-human interactions. Inspired by public art projects, the robot invites individuals to collaborate on a shared LEGO structure by using expressive eye tracking, autonomous turning, and servo-actuated drawer movement. Field deployments in Cornell University spaces showed the robot effectively acted as a social catalyst: diverse participants contributed to a shared structure, and strangers initiated conversations about the robot. This work offers a functional prototype and insights on robots as mediators of human connection and promotes ideas of empowering collaboration.
2025
HRI 2025
CART-MPC: Coordinating Assistive Devices for Robot-Assisted Transferring with Multi-Agent Model Predictive Control
Ruolin Ye, Shuaixing Chen, Yunting Yan, Joyce Yang, Christina Ge, Jose Barreiros, Kate Tsui, Tom Silver, and Tapomayukh Bhattacharjee
In Proceedings of the 2025 ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2025
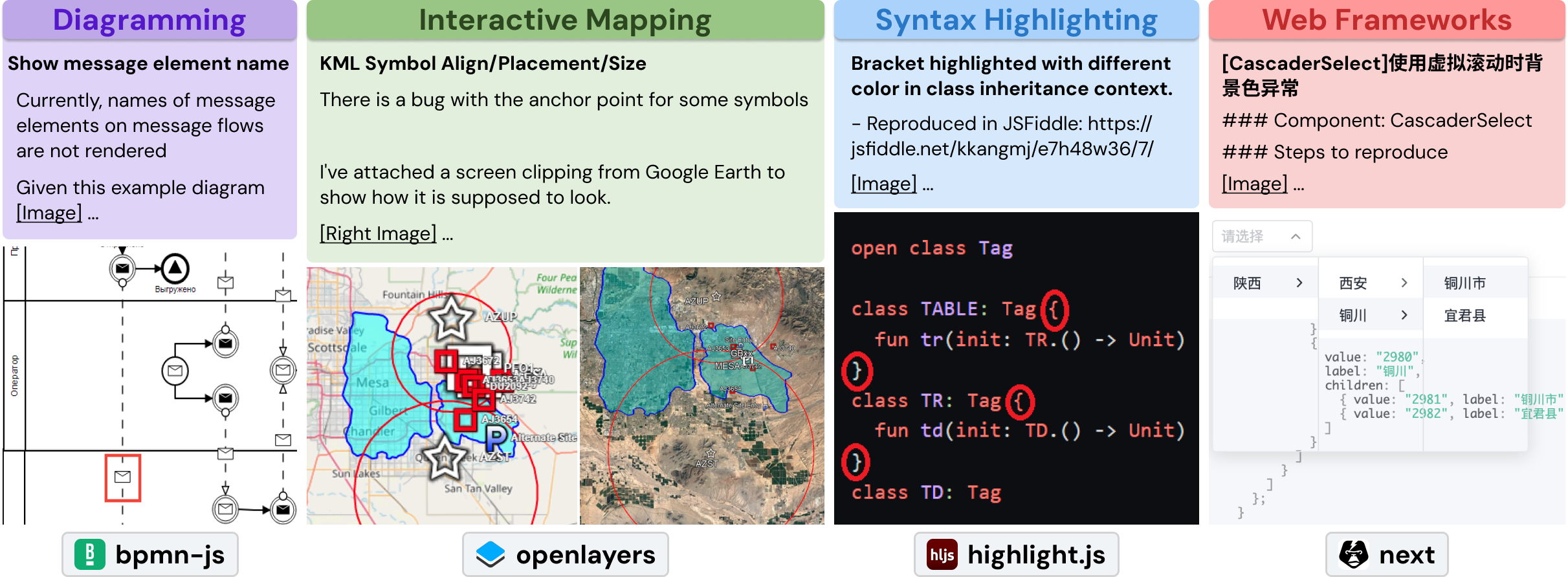
SWE-bench Multimodal: Do AI Systems Generalize to Visual Software Domains?
John Yang, Carlos E Jimenez, Alex L Zhang, Kilian Lieret, Joyce Yang, Xindi Wu, Ori Press, Niklas Muennighoff, Gabriel Synnaeve, Karthik R Narasimhan, Diyi Yang, Sida Wang, and Ofir Press
In The Thirteenth International Conference on Learning Representations, 2025